Пересечение поверхности с поверхностью (α ∩ β)
ТеорияДве поверхности пересекаются по линии, точки которой принадлежат каждой из пересекающихся поверхностей. Поэтому построение линии пересечения двух поверхностей α и β сводится к нахождению общих точек, принадлежащих как множеству точек, составляющему поверхность α, так и другому множеству точек, входящих в состав поверхности β.
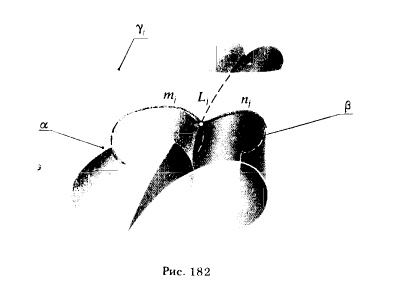
Способ построения линии пересечения двух поверхностей состоит в следующем: заданные поверхности пересекают третьей, вспомогательной поверхностью (вид и расположение вспомогательной секущей поверхности выбират с таким расчетом, чтобы можно было лег ко определить линии пересечения этой поверхности с заданными); находят линии, по которым эта вспомогательная секущая поверхность пересекает каждую из данных поверхностей. Далее отмечают точку (точки), в которой пересекаются полученные линии пересечения (рис. 182) .
Построив отмеченные операции n раз, получим множество точек. Линия l, соединяющая эти точки, является искомой линией пересечения поверхностей.
Используя геометрический язык, ход решения задачи можно представить в виде формализованного алгоритма, записанного в символической форме.
В табл. 8 дано традиционное для начертательной геометрии словесное описание алгоритма (слева) и соответствующая ему символическая запись на геометрическом языке (справа).
Таблица 8. Описание алгоритма решения задачи по определению линии пересечения двух поверхностей
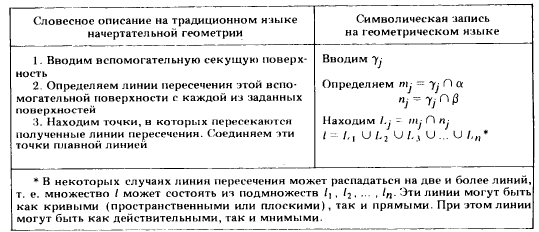
Алгоритм нахождения точек, общих для двух заданных множеств точек - поверхностей α и β можно записать в виде
l = (L1 ∪ L2 ∪ L3 ∪ ... ∪ Ln); [Lj = (γj ∩ α) ∩ (γj ∩ β)]. (4)
Повторяя многократно последовательность операций, обозначенных в приведенном алгоритме (каждый раз, естественно, меняя положение вспомогательной секущей поверхности γj), можно получить любое число точек, принадлежащих искомой линии пересечения заданных поверхностей.
Рассматриваемый алгоритм определения точек, принадлежащих линии пересечения двух поверхностей, является универсальным, так как
под α и β могут подразумеваться любые поверхности, в том числе и плоскости. На выбор вида и расположения вспомогательной секущей поверхности γj в приведенном алгоритме также не накладывается никаких ограничений.
Вдумчивый читатель может задать вполне справедливый вопрос: "Что это за алгоритм, который предписывает решать задачи по определению точки (точек), принадлежащей линии пересечения двух поверхностей, путем решения двух задач, в каждой из которых также приходится строить линию пересечения поверхностей?".
Такое, на первый взгляд, нелогичное построение алгоритма становится вполне оправданным, если учесть, что данные поверхности α и β могут иметь любую форму и занимать произвольное положение в пространстве, что не позволяет непосредственно, по эпюру, определить линию их пересечения. А в качестве вспомогательной секущей поверхности γj мы можем выбрать поверхность удобной формы и так ориентировать ее относительно плоскостей проекций, чтобы получить простое решение для определения линии ее пересечения с каждой из заданных поверхностей.
Среди инвариантных свойств ортогонального проецирования находим (Ф ⊂ γ) ∧ (γ ⊥ π1 ) ⇒ Ф' ⊂ h0γ, т. е., если фигура Ф принадлежит поверхности γ ⊥ плоскости π1 , то ортогональная проекция Ф' на эту плоскость принадлежит следу поверхности h0γ (см. § 6, свойство 2 г). Поэтому, если принять за вспомогательную секущую поверхность γ ⊥ π1 (или π2 ), то линии mj и nj пересечения этой поверхности с поверхностями α и β будут иметь горизонтальные (или фронтальные) проекции m'j ⊂ h0γj и n'j ⊂ h0γj (m"j ⊂ f0γj и n"j ⊂ f0γj ), т. е. решение подчас сложной задачи на построение линии пересечения поверхностей α и β мы заменяем решением двух простейших задач: 1) определить линию пересечения проецирующей поверхности γj с поверхностью α; 2) определить линию пересечения той же поверхности γj с поверхностью β. Очевидно, что каждая из этих задач сводится к построению второй проекции линии, принадлежащей поверхности, если известна одна из ее проекций. Решение последней задачи состоит из многократного определения недостающей проекции точки, принадлежащей поверхности, т. е. сводится к решению позиционной задачи второго вида А ∈ α (см. § 40).