Определение точек пересечения линии с поверхностью
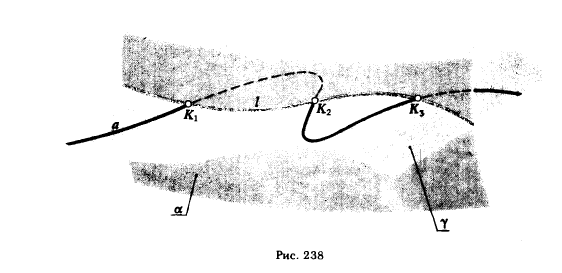
ТеорияВ общем случае для графического решения задачи по определению положения точек пересечения (встречи) линий с поверхностью необходимо выполнить ряд геометрических построений в приведенной ниже последовательности: заключить данную линию во вспомогательную поверхность; определить линию пересечения этой вспомогательной поверхности с заданной поверхностью; отметить точки, в которых пересекаются полученная линия с заданной (рис. 238).
* Эта теорема известна также как "теорема Монжа", по имени основоположника начертательной геометрии Гаспара Монжа, доказавшего эту теорему.
Запишем указанную последовательность решения в виде табл. 9 (как это сделано в § 43 при составлении алгоритма для решения задачи по определению линии пересечения двух поверхностей). В правой части таблицы приведена символическая запись, соответствующая смысловому содержанию отмеченных этапов решения.
Таблица 9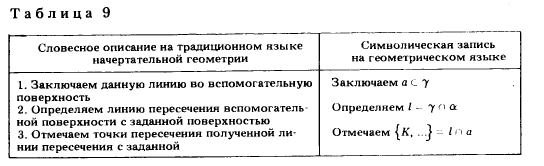
Алгоритм для решения задачи определения точек пересечения линии с поверхностью в символической форме можно записать:
{K,...} = (γ ∩ α) ∩ a.
Здесь, как и у алгоритма определения линии пересечения двух поверхностей, в зависимости от порядка и взаимного расположения заданных кривой и поверхности множество искомых точек {К, ...} может состоять из одной, двух и более точек.
Полученный алгоритм является универсальным, пригодным для решения задачи с любым вариантом задания исходных данных. Рассмотрим различные варианты решения задачи:
1. Пересечение кривой с поверхностью.
2. Пересечение кривой с плоскостью.
3. Пересечение прямой с поверхностью.
4. Пересечение прямой с плоскостью.
При решении всех этих задач, как правило, целесообразно для уменьшения графических построений и их упрощения пользоваться в качестве вспомогательной секущей поверхности γ - проецирующей цилиндричес-
кой поверхностью, в частности, если определяется точка пересечения прямой с поверхностью, - плоскостью. Упрощение решения достигается благодаря тому, что одна из проекций линии пересечения l автоматически определяется положением и формой следа проецирующей поверхности γ. Поэтому задача по определению точек встречи линии с поверхностью сводится к построению второй проекции линии, принадлежащей поверхности, если известна одна ее проекция, т. е. к задаче, которую мы неоднократно решали.
1. Пересечение кривой с поверхностью.
При определении содержания и последовательности выполнения геометрических операций, входящих в состав алгоритма для решения задачи по определению точек пересечения кривой с поверхностью, мы пользовались наглядным чертежом, изображенным на рис. 238. Теперь проследим, как решается эта задача на эпюре Монжа.
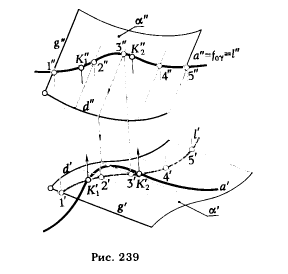
ПРИМЕР. Определить точки пересечения кривой а с произвольной цилиндрической поверхностью α (рис. 239) .
РЕШЕНИЕ.
1. Заключаем кривую а во фронтально проецирующую цилиндрическую поверхность γ.
2. Определяем линию пересечения поверхностей γ и α. Для этого отмечаем на а" ≡ f0γ ≡ l" произвольные точки 1", 2", 3", 4", 5"; зная фронтальные проекции точек, находим их горизонтальные проекции 1', 2', 3', 4', 5'. Соединив эти точки плавной кривой, получим горизонтальную проекцию l' кривой l, по которой вспомогательная цилиндрическая поверхность γ пересекает данную поверхность α.
3. Отмечаем точки К'1 и К'2 пересечения кривых l' и а'. По горизонтальным проекциям определяем их фронтальные проекции К"1 и К"2.
2. Пересечение кривой с плоскостью.
Решение этой задачи аналогично только что рассмотренной, если и есть какое-либо отличие, то оно состоит лишь в том, что приходится определять вторую проекцию линии, принадлежащую не цилиндрической поверхности, как это было в приведенном выше примере, а плоскости.
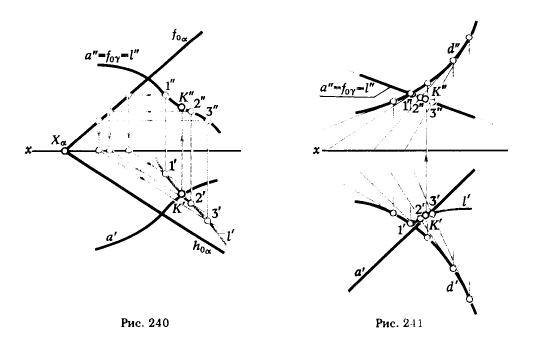
ПРИМЕР. Определить точку встречи линии а с плоскостью α (рис. 240).
РЕШЕНИЕ.
1. Заключаем линию а в проецирующую цилиндрическую поверхность γ, безразлично какую γ ⊥ π1 или γ ⊥ π2 (на рис. 240γ ⊥ π )
2. Обозначим линию пересечения γ ∩ α = l, тогда l" ⊂ f0γ.
3. Определяем горизонтальную проекцию Для этого отмечаем на l" ряд точек 1", 2", 3", ..., с помощью горизонталей (h1, h2, h3, ...) плоскости α находим точки 1', 2 , 3',.... принадлежащие l'
4. Отмечаем точку К' = l' ∩ α', по К' находим К".
3. Пересечение прямой с поверхностью.
В алгоритме решения задачи для определения точек встречи прямой с поверхностью в качестве вспомогательной секущей поверхности следует брать плоскость.
Сложность решения рассматриваемой группы задач зависит от трудоемкости нахождения линии пересечения γ ∩ α, которая определяется видом поверхности α и расположением прямой а как относительно поверхности α, так и по отношению к плоскостям проекций.
Чтобы получить рациональное решение, следует пользоваться наиболее простым способом определения линии l(l = γ ∩ α). Этого можно достигнуть двумя путями: 1) соответствующим выбором положения вспомогательной секущей плоскости γ или 2) переводом секущей прямой а в частное положение. Рассмотрим каждый из этих вариантов решения.
Вариант 1. а) Вспомогательная секущая плоскость - проецирующая.ПРИМЕР. Определить точку пересечения прямой а с поверхностью торса (рис. 241).
РЕШЕНИЕ. Заключаем прямую а во фронтально проецирующую плоскость γ. Фронтальная проекция линии пересечения l" совпадает с f0γ ≡ а". Отмечаем точку 1", в которой проекция l" пересекает проекцию d" ребра возврата d. Зная положение 1", определяем горизонтальную проекцию 1'. Проводим ряд прямолинейных образующих торсовой поверхности (касательных к кривой d) и фиксируем точки 2", 3", в которых l" пересекает фронтальные проекции этих образующих.
На горизонтальных проекциях соответствующих образующих определяем горизонтальные проекции 2', 3'. Соединив эти точки плавной кривой, получим горизонтальную проекцию l'.l' ∩ а' = К'- горизонтальная проекция искомой точки встречи. По К' определяем К".
б) Вспомогательная секущая плоскость - общего положения.Использование вспомогательной проецирующей плоскости не всегда упрощает решение, возможны случаи, когда целесообразно применять плоскость общего положения.
В качестве иллюстрации, подтверждающей эту мысль, может служить задача по определению точек пересечения прямой общего положения с конической поверхностью.
Плоскость пересекает коническую поверхность по кривой. Исключение составляет только плоскость, проходящая через вершину кони-
ческой поверхности. В этом случае кривая второго порядка распадается на две прямые - образующие конической поверхности (см. § 45) *
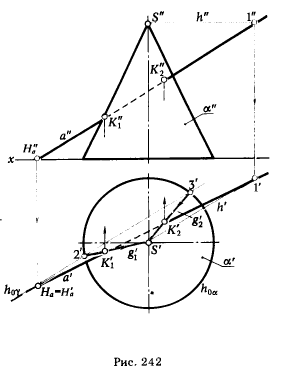
ПРИМЕР. Определить точки пересечения прямой а с поверхностью прямого кругового конуса α (рис. 242).
РЕШЕНИЕ. Заключаем прямую а в плоскость γ, проходящую через вершину конической поверхности S. На рис. 242 плоскость γ задана пересекающимися прямыми а и h , при этом h - горизонталь.
Определяем горизонтальный след плоскости γ; для этого находим горизонтальный след прямой Нa и через него проводим h0γ параллельно горизонтальной проекции горизонтали h'. Отмечаем точки 2' и 3', в которых h0γ ∩ h0α. (S'2') и (S'3') - образующие поверхности α, по которым она пересекается плоскостью γ.
Точки К'1 и К'2 (К'1 = а' ∩ (S'2') и К'2 = а' ∩ (S'3')) - горизонтальные проекции искомых точек пересечения. Зная положение К'1 и К'2, определяем К"1 и К"2.
Вариант 2. Перевод секущей прямой в частное положение.При пересечении поверхности сферы плоскостью в сечении получается окружность, которая проецируется на плоскости проекции в общем случае в виде эллипсов или прямой и эллипса (если секущая плоскость проецирующая). В частном случае, когда секущая плоскость параллельна плоскости проекции, окружность проецируется на эту плоскость проекции без искажения. Поэтому, чтобы упростить решение задачи, следует произвольно расположенную прямую перевести в положение, параллельное какой-либо плоскости проекции. Тогда представляется возможность заключить прямую в плоскость, параллельную плоскости проекции.
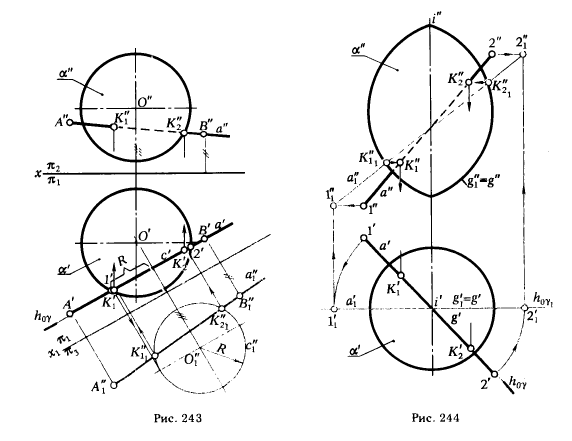
ПРИМЕР 1. Определить точки встречи прямой а, заданной отрезком [АВ] с поверхностью сферы α (рис. 243).
РЕШЕНИЕ. Переводим прямую, произвольно расположенную в пространстве, в положение, параллельное плоскости проекции. Для этого переходим от системы xπ2/π1 к системе x1π3/π1 в которой π3 || а .
В этом случае горизонтально проецирующая плоскость γ ⊃ a пересечет поверхность сферы по окружности с радиуса R (см. рис. 243) , которая спроецируется на плоскость π1 в [ 1'2'], а на плоскость π3 в окружность с"1 того же радиуса R. Точки K"1 и К"2 пересечения с"1 с [А"1В"1] - вспомогательные проекции искомых точек, по ним определяем вначале К'1 и К'2, а затем и К"1 и К"2.
Если прямая а , пересекающая поверхность вращения, проходит через ось i этой поверхности, то перевод прямой а в частное положение целесообразно осуществить путем вращения прямой вокруг оси i.
ПРИМЕР 2. Определить точки встречи прямой а с поверхностью вращения α (рис. 244).
* Если секущая плоскость проходит через вершину конической поверхности и составляет с ее осью угол больший, чем угол наклона к этой оси образующей конической поверхности, то сечение распадается на две мнимые прямые.
РЕШЕНИЕ. Горизонтально проецирующая плоскость γ, в которую заключаем прямую а , пересечет поверхность вращения по меридиану g1.
Чтобы не строить искаженной фронтальной проекции меридионального сечения, поворачиваем плоскость γ и находящуюся в ней прямую а вокруг оси i до положения, параллельного π2, тогда g'1 совпадает g' - горизонтальной проекцией главного меридиана, a h0γ с h0γ1. После поворота прямая а займет положение a1(а'1, а"1). С помощью точек К"11 и К"12 , в которых a"1 ∩ g"1, определяем положение К"1 и К"2, а затем К'1 и К'2.
4. Пересечение прямой с плоскостью.Определение точки встречи прямой с плоскостью относится к элементарной задаче, но ее значение для решения самых различных, более сложных задач, трудно переоценить. Задача по нахождению точки встречи прямой с плоскостью входит как составная часть (фрагмент) в алгоритм решения широкого круга как позиционных, так и метрических задач.
Решение этой задачи даже в самом общем случае, когда и плоскость и прямая занимают произвольное положение в пространстве, легко сводится к простейшей задаче по определению линии пересечения двух плоскостей, из которых одна - проецирующая (см. § 44, рис. 187, 188), с последующим определением второй проекции точки, принадлежащей плоскости, если известна одна из ее проекций (см. § 40, примеры 1 ... 3, рис. 169... ...171). Для этого достаточно прямую заключить во вспомогательную проецирующую плоскость.
ПРИМЕР 1. Определить точку встречи прямой а с плоскостью α (рис. 245).
РЕШЕНИЕ. Так как а - прямая, то в алгоритме К = (γ ∩ α) ∩ a в качестве
секущей поверхности следует выбирать плоскость. Эта плоскость пересечет заданную α по прямой l . Поэтому в рассматриваемом случае предписываемая алго-
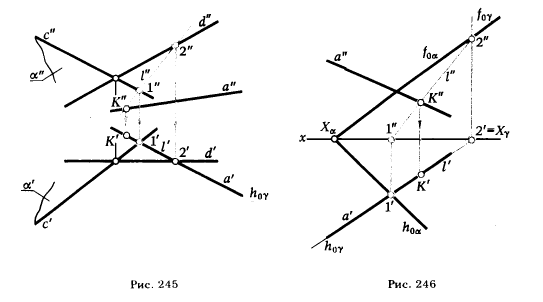
ритмом последовательность выполнения геометрических построений будет иметь следующее содержание:
1) проводим через а' (или а") горизонтальный (фронтальный) след горизонтально проецирующей (фронтально проецирующей) плоскости γ;
2) определяем фронтальную (горизонтальную) проекцию линии пересечения плоскости γ с данной плоскостью α l" = γ" ∩ α" (или l' = γ' ∩ α');
3) определяем К" = а" ∩ l" (или К' = а' ∩ l'); зная К", находим К' (или зная К', находим К").
Алгоритм решения не меняется, если мы будем иметь дело с другим вариантом задания плоскости - параллельными прямыми или прямыми, по которым плоскость пересекает плоскости проекций (следами плоскости).
ПРИМЕР 2. Определить точку пересечения прямой а с плоскостью α (рис. 246).
РЕШЕНИЕ. Так же, как и в предыдущем примере, заключаем прямую а в проецирующую плоскость γ ⊃ a (h 0γ ≡ а'). Строим линию пересечения плоскостей γ ∩ α = l . Отмечаем К" = l" ∩ α". По К" находим К'.
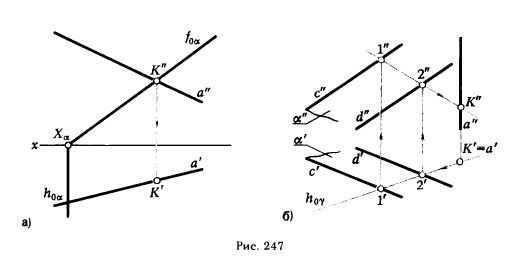
Решение задачи упрощается, если одна из заданных фигур (прямая или плоскость) занимает проецирующее положение. Рис. 247,а и б иллюстрирует решение таких задач:
а) плоскость α - проецирующая, а прямая a -общего положения (рис. 247 а);
б) плоскость α - общего положения, а прямая а - проецирующая (рис. 247,6).
Решения задач настолько просты, что они ясны из чертежей и не требуют каких-либо пояснений.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
- Изложите общий принцип построения обобщенного алгоритма для решения задачи по определению линии пересечения поверхностей.
- Сформулируйте возможные варианты решения задачи по определению линии пересечения многогранника плоскостью.
- В каких случаях для определения линии пересечения двух поверхностей можно применять способ:
- Какие точки линии пересечения поверхностей называются опорными?
- Напишите и дайте пояснение алгоритма решения задачи по определению точки встречи прямой с плоскостью.
- В чем заключается решение задач по определению сечения поверхности плоскостью с помощью способа граней и способа ребер?
- В каких случаях плоскость пересекает поверхность прямого кругового конуса: по двум пересекающимся прямым, по окружности, эллипсу, параболе, гиперболе?
- Что представляют собой фронтальные проекции линии пересечения двух поверхностей вращения второго порядка, имеющих общую плоскость симметрии, параллельную плоскости π2 ?
- Какая зависимость существует между порядком пересекающихся поверхностей и порядком линии, полученной в результате их пересечения?
- Сформулируйте условия (теоремы) , при которых кривая - линия пересечения поверхностей - распадается на две кривые второго порядка?
- Приведите примеры, когда кривая - линия пересечения двух цилиндрических поверхностей - распадается на одну, две, три, четыре прямых.
- В чем состоит содержание алгоритма решения задачи для определения точек пересечения линии с поверхностью?
- Чем следует руководствоваться при выборе вспомогательной секущей поверхности при определении точек пересечения линии с поверхностью?
- В каком случае можно для упрощения решения задачи по определению точек встречи прямой с поверхностью применять способ вращения вокруг оси, перпендикулярной плоскости проекции?
а) вращающихся плоскостей;
б) пучка плоскостей с несобственной прямой;
в) концентрических сфер;
г) эксцентрических сфер?