Другие способы преобразования ортогональных проекций
ТеорияКроме плоскопараллельного перемещения и замены плоскостей проекций начертательная геометрия располагает большим количеством различных способов получения новых, наиболее удобных для решения задач проекций по заданным неудобным.
В тридцатые годы вышла в свет книга С. М. Колотова "Вспомогательное проектирование"*, в которой были изложены основные принципы получения неискаженного вида прямоугольных проекций на специально выбранную плоскость, а также построения косоугольных и центральных проекций на заданные плоскости проекции.
В последующие годы появилась серия работ, посвященных созданию новых и усовершенствованию ранее предложенных способов вспомогательного проецирования.
Особое место среди этих работ занимают работы, посвященные криволинейному вспомогательному проецированию. Их авторы использовали для получения вспомогательных проекций в качестве проецирующих кривые линии, пространственные или плоские.
В настоящее время имеется много хорошо разработанных и доведенных до практического использования способов, которые могут быть объединены под общим названием вспомогательное проецирование.
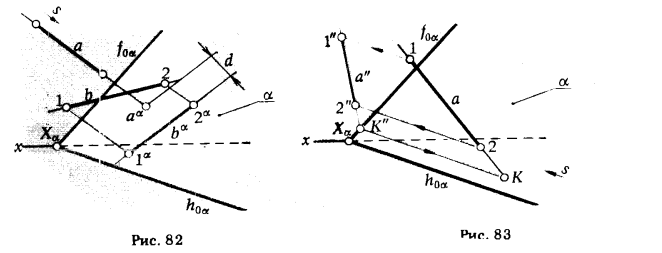
Рис. 82 ... 85 дают наглядное представление о получении проекций, удобных для решения задач с помощью вспомогательного проецирования. Так, на рис. 82 решена задача по определению расстояния между скрещивающимися прямыми а и Ь путем ортогонального проецирования этих прямых на вспомогательную плоскость α⊥a. При этом направление проецирования s || а.
Рис. 83 показывает целесообразность использования косоугольного проецирования на заданную плоскость проекции при решении задачи по определению точки встречи прямой с плоскостью.
Известно, что точка встречи прямой с плоскостью определяется элементарно просто, если плоскость занимает проецирующее положение. В случае, изображенном на рис. 83, плоскость общего положения α переведена во фронтально проецирующее положение путем проецирования α на плоскость проекции π2 в направлении горизонтали этой плоскости.
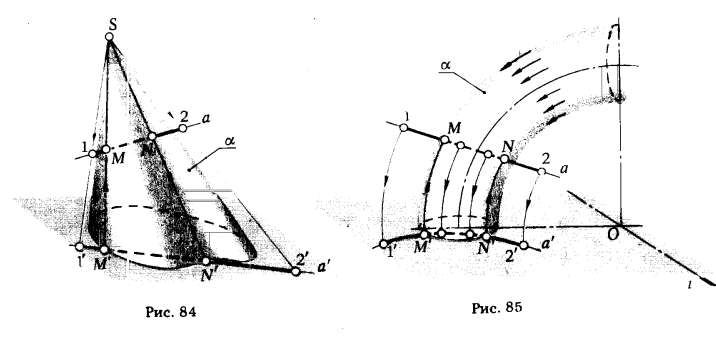
На рис. 84 для определения точек встречи прямой а с произвольной конической поверхностью применено центральное проецирование. За центр проекций принята вершина конической поверхности S. В этом случае коническая поверхность оказывается проецирующей, что значительно упрощает решение поставленной задачи.
На рис. 85 приведен пример решения задачи по определению точек встречи прямой с поверхностью кольца. Для упрощения решения ртой задачи использовано криволинейное (в частности, окружностное) проецирование. При таком способе проецирования поверхность кольца оказывается горизонтально проецирующей. Все построения для нахождения положения точек М и N ясны из чертежа и не требуют пояснений.
Использование теорем проективной геометрии и свойств коллинеарных преобразований дало толчок к созданию различных способов
* Колотое С. М. Вспомогательное проектирование. Киев, 1933.
перспективно-аффинных и гомологических преобразований ортогональных проекций, составляющих основу проективных преобразований.
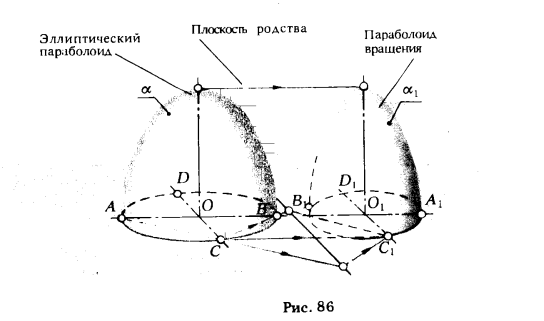
На рис. 86 показано перспективно-аффинное преобразование эллиптического параболоида в параболоид вращения. Рис. 87 дает наглядное представление о преобразовании поверхности гиперболоида вращения α в сферу α1 путем гомологических преобразований, Не вызы-
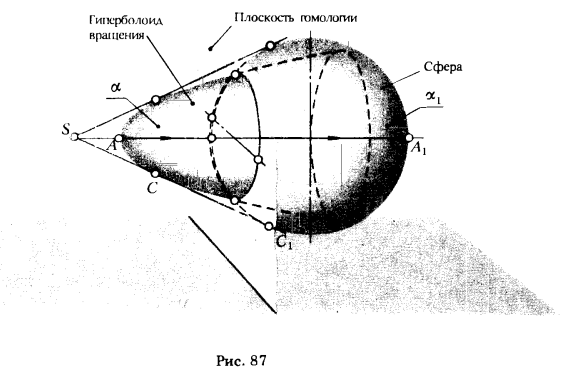
вает сомнения целесообразность таких преобразований. Действительно, при решении позиционных задач лучше иметь дело с поверхностью вращения, чем с эллиптическим параболоидом (рис. 86), и со сферой, чем с поверхностью гиперболоида вращения (рис. 87). И, наконец, применение топологических преобразований пространства и погруженных в него геометрических фигур привело к созданию чрезвычайно гибкого способа, позволяющего осуществить преобразование сложных нелинейчатых поверхностей, ограничивающих геометрические тела, в простые цилиндрические поверхности и даже плоскости.
В основе рассматриваемых преобразований лежат топологические свойства:
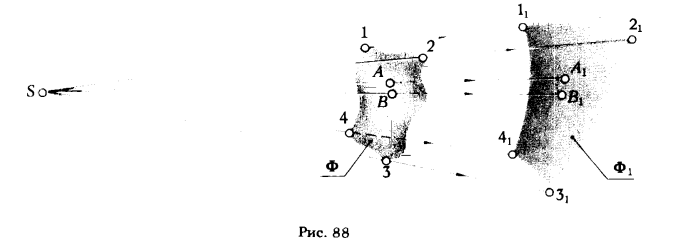
а) взаимная однозначность - каждой точке исходной фигуры Ф соответствует одна и только одна точка преобразованной фигуры Ф1;
б) взаимная непрерывность - бесконечно близким точкам исходной фигуры Ф соответствуют также бесконечно близкие точки преобразованной фигуры Ф1. На рис. 88 бесконечно близким точкам А и В фигуры Ф соответствуют две бесконечно близкие точки А1 и В1 фигуры Ф1.
Преобразования, обеспечивающие сохранение топологических свойств составляют теоретическую базу способа топологических преобразований.
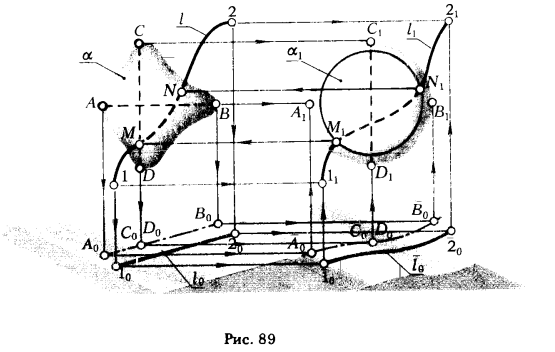
На рис. 89 показано решение задачи по определению точек встречи плоской кривой l с произвольной поверхностью вращения α. Топологическим преобразованием фигура Ф, ограниченная произвольной поверхностью вращения α, преобразована в шар α1. Указанными преобразованиями задача сведена к простейшей - определению точек встречи плоской кривой с поверхностью сферы. Зная положение точек M1 и N1, с помощью линий связи (прямых, параллельных оси х) определяем М и N.
Изучение отмеченных выше способов преобразования ортогональных проекций выходит за рамки учебной программы курса начертательной геометрии для втузов. Мы остановились на них лишь для того, чтобы читатель имел в виду, что кроме классических способов (см.. § 9 ... 14) в арсенале начертательной геометрии имеются и другие, подчас более мощные, способы преобразования ортогональных проекций*.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
- В чем состоит принцип преобразования ортогональных проекций способом плоскопараллельного перемещения?
- В чем: состоит отличие способа вращения вокруг осей, перпендикулярных к плоскости проекции, от способа параллельного перемещения?
- Как определяется положение центра вращения и величина радиуса вращения точки при ее повороте вокруг горизонтали и фронтали?
- Как можно определить совмещенное с плоскостью π1 (π2) положение фронтального (горизонтального) следа плоскости без нахождения центра и радиуса вращения?
- Как перемещаются проекции точки при ее вращении вокруг оси, перпендикулярной к плоскости проекции π1 (π2 ) ?
- Сколько параллельных перемещений и в какой последовательности необходимо выполнить, чтобы перевести отрезок прямой общего положения в отрезок горизонтально (фронтально) проецирующей прямой?
- В чем состоит сущность преобразования ортогональных проекций способом замены плоскостей проекций?
- Сколько перемен плоскостей проекций и в какой последовательности необходимо выполнить, чтобы перевести отрезок прямой общего положения в отрезок фронтально (горизонтально) проецирующей прямой?
* Более подробные сведения о перечисленных способах преобразования читатель найдет в книге С. А. Фролова "Методы преобразования ортогональных проекций". М.: Машиностроение, 1970.