Классификация поверхностей
ТеорияМногообразие форм поверхностей создает большие трудности при их изучении. Для того чтобы облегчить процесс изучения поверхностей, целесообразно осуществить их систематизацию, распределив все поверхности по классам, подклассам, группам и подгруппам.
При делении поверхностей на классы, подклассы, группы, подгруппы следует к одной классификационной категории относить поверхности, обладающие характерным признаком, который у поверхностей, входящих в другую категорию, отсутствует. Таким признаком может служить, в частности, единство способов образования поверхностей, т. е. тех условий, которые входят в определитель поверхности. Поэтому в основу систематизации поверхностей может быть положен их определитель.
Будем считать, что поверхности принадлежат одному классу, если они имеют одинаковое содержание геометрической части определителя. Используя этот критерий, все многообразие поверхностей можно отнести к двум классам:
класс I составляют поверхности, образующие g?j которых — кривые линии;
класс II объединяет поверхности, образованные прямой линией, т. е. gi — прямая.
Поверхности, входящие в класс I, называются нелинейчатыми в отличие от поверхностей класса II, которые считаются линейчатыми.
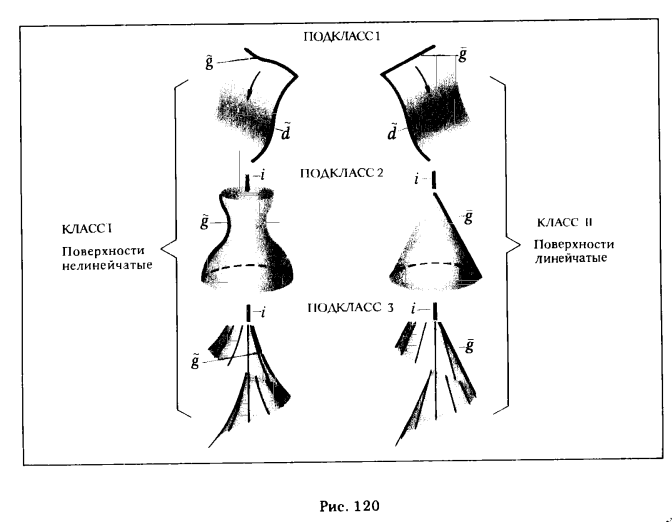
При отнесении поверхностей к классам I или II во внимание принималась геометрическая часть определителя — вид линии, образующей поверхность. Условия алгоритмической части определителя, характеризующие закон движения образующей, позволяют выделить из классов I и II поверхностей три подкласса (рис. 120).
* Следует иметь в виду, что многообразие поверхностей и способов их получения не имеет предела, поэтому создать строгую систему для классификации поверхностей не представляется возможным. Более того, с геометрической точки зрения классификация поверхностей не может иметь научного обоснования. Что касается методики, используемой в процессе обучения, то здесь, напротив, всякая попытка систематизации материала, в том числе и рассматриваемого вопроса о классификации поверхностей, заслуживает самого серьезного внимания.
Подкласс 1 содержит поверхности, образованные поступательным перемещением образующей линии. Такие поверхности называют поверхностями параллельного переноса. Их определитель — Ф (g, d); [gj = Td(g)]*.
Подкласс 2 составляют поверхности, образованные вращением образующей линии — поверхности вращения. Их определитель — Ф (g, i); [gj = Ri(g)] *.
Подкласс 3 включает поверхности, образованные винтовым перемещением образующей, — винтовые поверхности. Их определитель — Ф(g, i); [gj = Ti(g) º Ri(g) ] **.
Поверхности подклассов 1, 2 и 3 имеют одинаковую геометрическую часть определителя. В зависимости от вида образующей (кривая или прямая) поверхности параллельного переноса, вращения и винтовые могут быть отнесены как к первому (g? — кривая) ***, так и ко второму (g — прямая) классам (см. рис. 120).
Каждый из классов I и II делится на группы А, Б, ... , которые могут быть подразделены на подгруппы а, б, ... В свою очередь, подгруппы состоят из отдельных видов поверхностей α, β, ... Критерии для деления на группы, подгруппы и виды также берутся из определителя по-
* Выражения Td(g) и Ri(g) указывают на характер движения образующей g, так Td(g) ~ поступательное перемещение вдоль d, Ri(g) — вращение вокруг i.
** Здесь Ti(g) º Ri(g) — композиция из двух движений: параллельного перемещения вдоль оси и вращения вокруг оси i.
*** Следует помнить, что образующая кривая g? не меняет своей формы.
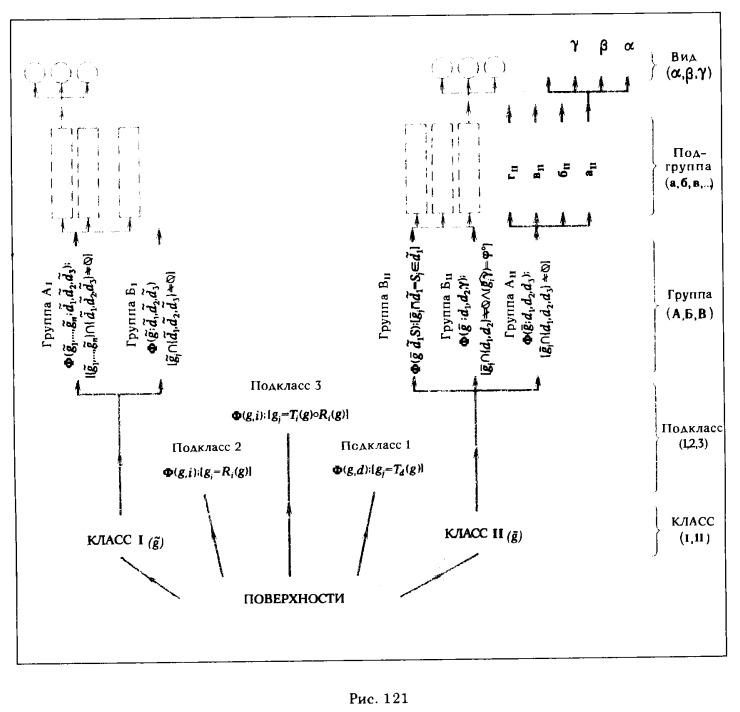
верхности. На рис. 121 показана общая структура отнесения поверхностей к классам, подклассам, группам, подгруппам и видам. Из рис. 121 видно, что класс II (линейчатые поверхности) содержит три группы АII, БII, ВII- Признаком для такого деления служит число направляющих линий:
группа АII — линейчатые поверхности с тремя направляющими
Ф (g; d1,d2,d3); [gj ∩ {d1,d2,d3} ≠ ∅];
группа БII — линейчатые поверхности с двумя направляющими (функции третьей направляющей выполняет направляющая плоскость γ)

группа ВII — линейчатые поверхности с одной направляющей (ребром возврата); в этом случае все три направляющие "совпадают" с ребром возврата ?1 |?1 ≡ ?2 ≡ ?3|
Ф (g,; ?);[g  {?1 ≡ ?2 ≡ ?3} ≠ ∅]]
{?1 ≡ ?2 ≡ ?3} ≠ ∅]]
В свою очередь, каждая группа подразделяется на подгруппы. Так, группа АII содержит четыре подгруппы (см. рис. 121) :
аII — косой цилиндр с тремя направляющими
Ф (g?; ?1, ?2, ?3); [gj ∩ { ?1, ?2, ?3} ≠ ∅],
все три направляющие ?1, ?2, ?3 — кривые;
бII — дважды косой цилиндроид
Ф (g; ?1, ?2, ?3); [gj ∩ { ?1, ?2, d3 } ≠ ∅],
две направляющие ?1, ?2 - кривые, d3 — прямая;
вII — дважды косой коноид
Ф (g; ?1, d2,d3); [gj ∩ { ?1, d2, d3 } ≠ ∅]
одна направляющая ?1 — кривая, две d2,d3 - прямые;
гII — однополостный гиперболоид
Ф (g; d1, d2,d3); [gj ∩ { d1, d2, d3 } ≠ ∅]
все три направляющие d1, d2, d3 — прямые.
Каждая из подгрупп включает отдельные виды поверхностей, например, в подгруппу бII входят: α — поверхность косого клина, β — поверхность дважды косого винтового цилиндроида и γ — поверхность косого перехода.
Рассмотрим более подробно поверхности, входящие в каждый из отмеченных классов и подклассов.
КЛАСС I